ГОСТ Р 60.0.0.2-2016
НАЦИОНАЛЬНЫЙ СТАНДАРТ РОССИЙСКОЙ ФЕДЕРАЦИИ
РОБОТЫ И РОБОТОТЕХНИЧЕСКИЕ УСТРОЙСТВА
Классификация
Robots and robotic devices. Classification
ОКС 25.040.30
ОКП 38 8600
Дата введения 2018-01-01
Предисловие
1 РАЗРАБОТАН Федеральным государственным автономным научным учреждением "Центральный научно-исследовательский и опытно-конструкторский институт робототехники и технической кибернетики" (ЦНИИ РТК)
2 ВНЕСЕН Техническим комитетом по стандартизации ТК 459 "Информационная поддержка жизненного цикла изделий"
3 УТВЕРЖДЕН И ВВЕДЕН В ДЕЙСТВИЕ Приказом Федерального агентства по техническому регулированию и метрологии от 29 ноября 2016 г. N 1842-ст
4 ВЗАМЕН ГОСТ 25685-83
5 ПЕРЕИЗДАНИЕ. Декабрь 2018 г.
Правила применения настоящего стандарта установлены в статье 26 Федерального закона от 29 июня 2015 г. N 162-ФЗ "О стандартизации в Российской Федерации". Информация об изменениях к настоящему стандарту публикуется в ежегодном (по состоянию на 1 января текущего года) информационном указателе "Национальные стандарты", а официальный текст изменений и поправок - в ежемесячном информационном указателе "Национальные стандарты". В случае пересмотра (замены) или отмены настоящего стандарта соответствующее уведомление будет опубликовано в ближайшем выпуске ежемесячного информационного указателя "Национальные стандарты". Соответствующая информация, уведомление и тексты размещаются также в информационной системе общего пользования - на официальном сайте Федерального агентства по техническому регулированию и метрологии в сети Интернет (www.gost.ru)
Введение
Стандарты комплекса ГОСТ Р 60 распространяются на роботы и робототехнические устройства. Их целью является повышение интероперабельности роботов и их компонентов, а также снижение затрат на их разработку, производство и обслуживание за счет стандартизации и унификации процессов, интерфейсов и параметров.
Стандарты комплекса ГОСТ Р 60 представляют собой совокупность отдельно издаваемых стандартов. Стандарты данного комплекса относятся к одной из следующих тематических групп: "Общие положения, основные понятия, термины и определения", "Технические и эксплуатационные характеристики", "Безопасность", "Виды и методы испытаний", "Механические интерфейсы", "Электрические интерфейсы", "Коммуникационные интерфейсы", "Методы программирования", "Методы построения траектории движения (навигация)", "Конструктивные элементы". Стандарты любой тематической группы могут относиться как ко всем роботам и робототехническим устройствам, так и к отдельным группам объектов стандартизации: промышленным роботам в целом, промышленным манипуляционным роботам, промышленным транспортным роботам, сервисным роботам в целом, сервисным манипуляционным роботам и сервисным мобильным роботам.
Настоящий стандарт относится к тематической группе "Общие положения, основные понятия, термины и определения" и распространяется на все роботы и робототехнические устройства наземного применения*.
_______________
* Классификация роботов космического, воздушного, надводного и подводного применения, а также детальные классификации отдельных видов наземных роботов должны быть определены в других стандартах.
1 Область применения
Настоящий стандарт устанавливает классификацию роботов и робототехнических устройств.
Требования настоящего стандарта распространяются на промышленные и сервисные роботы и робототехнические устройства, предназначенные для использования в помещениях и на открытом воздухе в наземных условиях*.
_______________
* Классификации роботов космического, воздушного, надводного и подводного применения, а также детальные классификации отдельных видов наземных роботов должны быть определены в других стандартах.
2 Нормативные ссылки
В настоящем стандарте использованы нормативные ссылки на следующие стандарты:
ГОСТ Р 54344 Техника пожарная. Мобильные робототехнические комплексы для проведения аварийно-спасательных работ и пожаротушения. Классификация. Общие технические требования. Методы испытаний
ГОСТ Р 55895 Техника пожарная. Системы управления робототехнических комплексов для проведения аварийно-спасательных работ и пожаротушения. Общие технические требования. Методы испытаний
Примечание - При пользовании настоящим стандартом целесообразно проверить действие ссылочных стандартов (сводов правил и/или классификаторов) в информационной системе общего пользования - на официальном сайте Федерального агентства по техническому регулированию и метрологии в сети Интернет или по ежегодно издаваемому информационному указателю "Национальные стандарты", который опубликован по состоянию на 1 января текущего года, и по выпускам ежемесячно издаваемого информационного указателя "Национальные стандарты" за текущий год. Если заменен ссылочный стандарт (документ), на который дана недатированная ссылка, то рекомендуется использовать действующую версию этого стандарта (документа) с учетом всех внесенных в данную версию изменений. Если заменен ссылочный стандарт (документ), на который дана датированная ссылка, то рекомендуется использовать версию этого стандарта (документа) с указанным выше годом утверждения (принятия). Если после утверждения настоящего стандарта в ссылочный стандарт (документ), на который дана датированная ссылка, внесено изменение, затрагивающее положение, на которое дана ссылка, то это положение рекомендуется применять без учета данного изменения. Если ссылочный стандарт (документ) отменен без замены, то положение, в котором дана ссылка на него, рекомендуется применять в части, не затрагивающей эту ссылку.
3 Термины и определения
В настоящем стандарте применены следующие термины с соответствующими определениями:
3.1
робот (robot): Исполнительное устройство с двумя или более программируемыми степенями подвижности, обладающее определенным уровнем автономности и способное перемещаться во внешней среде с целью выполнения поставленных задач. [1, пункт 2.6]* |
________________
* См. раздел Библиография. - .
3.2
робототехническое устройство (robotic device): Исполнительное устройство, обладающее свойствами промышленного или сервисного робота, но у которого отсутствует требуемое число программируемых степеней подвижности или определенный уровень автономности. [1, пункт 2.8] |
3.3
степень подвижности (axis): Управляемая координата, используемая для определения вращательного или поступательного движения робота. [1, пункт 4.3] |
3.4
автономность (autonomy): Способность выполнять поставленные задачи в зависимости от текущего состояния и восприятия окружающей среды без вмешательства человека. [1, пункт 2.2] |
3.5
промышленный робот (industrial robot): Автоматически управляемый, перепрограммируемый манипулятор, программируемый по трем или более степеням подвижности, который может быть установлен стационарно или на мобильной платформе для применения в целях промышленной автоматизации. [1, пункт 2.9] |
3.6
сервисный робот (service robot): Робот, выполняющий нужную для человека или оборудования работу, за исключением применений в целях промышленной автоматизации. [1, пункт 2.10] |
3.7
манипулятор (manipulator): Устройство, механизм которого обычно состоит из нескольких звеньев, вращающихся или перемещающихся поступательно друг относительно друга с целью взятия и/или перемещения объектов (деталей или инструмента), как правило, по нескольким степеням свободы. [1, пункт 2.1] |
3.8
степень свободы (degree of freedom): Одна из координат, максимальное число которых - 6, необходимых для определения движения тела в пространстве.
[1, пункт 4.4]
3.9
мобильный робот (mobile robot): Робот, способный передвигаться под своим собственным управлением. [1, пункт 2.13] |
3.10
мобильная платформа (mobile platform): Совокупность всех компонентов мобильного робота, обеспечивающих его передвижение. [1, пункт 3.18] |
3.11 манипуляционный робот (manipulating robot): Автоматически управляемый, перепрограммируемый манипулятор, программируемый по трем или более степеням подвижности, который может быть установлен стационарно или на мобильной платформе.
3.12 транспортный робот (transport robot): Мобильный робот, предназначенный для перемещения на своей платформе физических объектов.
4 Общие положения
В общем случае все устройства, принадлежащие к классу роботов, в соответствии с [1] подразделяются на две группы в зависимости от числа программируемых степеней подвижности и степени автономности: роботы (3.1) и робототехнические устройства (3.2). Однако в дальнейшем в настоящем стандарте и в других стандартах комплекса "Роботы и робототехнические устройства" термин "робот", если иное не оговорено особо, обозначает устройства, относящиеся к обеим этим группам, т.е. соответствующие, как определению 3.1, так и определению 3.2.
5 Классификация роботов
В соответствии с [1] все роботы делятся на две категории: - промышленные роботы (3.5) и сервисные роботы (3.6). Каждая из этих категорий роботов имеет свою классификацию, установленную ниже.
5.1 Классификация промышленных роботов
5.1.1 Промышленные роботы подразделяют на:
- промышленные манипуляционные роботы, выполняющие основные технологические операции;
- промышленные транспортные роботы, осуществляющие внутрицеховые и межцеховые перемещения грузов.
Примечание - На транспортном роботе могут быть установлены манипуляционный робот или иное устройство для выполнения погрузо-разгрузочных операций.
5.1.2 Промышленные манипуляционные роботы классифицируют по следующим признакам:
- специализация;
- грузоподъемность;
- способ управления;
- способ программирования;
- тип привода;
- возможность передвижения;
- выполняемая технологическая операция;
- кинематическая схема;
- способ установки на рабочем месте.
5.1.3 По специализации промышленные манипуляционные роботы подразделяют на:
- специальные;
- специализированные;
- универсальные.
5.1.4 По грузоподъемности промышленные манипуляционные роботы подразделяют на:
- сверхлегкие - роботы номинальной грузоподъемностью 1 кг;
- легкие - роботы номинальной грузоподъемностью >110 кг;
- средние - роботы номинальной грузоподъемностью >10200 кг;
- тяжелые - роботы номинальной грузоподъемностью >2001000 кг;
- сверхтяжелые - роботы номинальной грузоподъемностью >1000 кг.
5.1.5 По способу управления промышленные манипуляционные роботы подразделяют на:
- роботы с ручным управлением - копирующие манипуляторы;
- роботы с программным управлением - все действия и движения робота определены в программе, последовательность команд в которой является постоянной или изменяется в функции от контролируемых параметров внешней среды, идентифицируемых по наличию или отсутствию сигналов одного или нескольких измерительных устройств или других (как правило, релейного типа) входных сигналов.
Примечание - К роботам с программным управлением относятся также роботы, конструкция которых обеспечивает возможность их приспособления к изменяющимся условиям внешней среды (например, механизм самоориентации или податливости захватного устройства при взаимодействии с неориентированным объектом);
- роботы с адаптивным управлением - роботы, снабженные датчиками для восприятия внешней среды, обеспечивающими автоматическое изменение последовательности команд в программе, определяющей действия и движения робота, в функции от контролируемых параметров состояния внешней среды, идентифицируемых при помощи специальных алгоритмов обработки данных, поступающих от датчиков (например, для определения положения и ориентации детали на конвейере).
5.1.5.1 Промышленные манипуляционные роботы с программным и адаптивным управлением по способу формирования траектории движения подразделяют на:
- роботы с цикловым управлением - управляющая программа определяет жесткую последовательность движений робота по степеням подвижности.
Примечания
1 Как правило, цикловое управление реализуют с помощью перенастраиваемых механических упоров.
2 Роботы с цикловым управлением относятся только к роботам с программным управлением;
- роботы с позиционным управлением - управляющая программа определяет последовательность точек позиционирования без контроля траектории движения между ними;
- роботы с траекторным управлением - управляющая программа определяет движение рабочего органа робота по заданной траектории без контроля скорости перемещения по траектории.
Примечание - Траекторное управление является предельным случаем позиционного управления, при котором расстояние между соседними точками позиционирования стремится к нулю;
- роботы с контурным управлением - управляющая программа определяет движение рабочего органа робота по заданной траектории с установленным распределением во времени значений скорости и ускорения.
5.1.6 По способу программирования промышленные манипуляционные роботы подразделяют на:
- роботы, программируемые копированием;
- роботы, программируемые обучением;
- роботы, программируемые аналитически;
- роботы, программируемые целеуказанием.
5.1.7 По типу привода промышленные манипуляционные роботы подразделяют на:
- роботы с электромеханическими приводами;
- роботы с гидравлическими приводами;
- роботы с пневматическими приводами;
- роботы с комбинированными приводами.
5.1.8 По возможности передвижения промышленные манипуляционные роботы подразделяют на:
- стационарные роботы;
- подвижные роботы.
Примечания
1 Как правило, подвижные манипуляционные роботы перемещаются между обслуживаемыми ими станками по монорельсу, установленному на полу или над станками.
2 Большинство существующих промышленных манипуляционных роботов относятся к классу стационарных роботов.
5.1.9 По выполняемой технологической операции промышленные манипуляционные роботы подразделяют на:
- универсальные роботы - роботы, осуществляющие разные технологические операции в зависимости от установленного рабочего органа;
- сборочные роботы - роботы, осуществляющие сборочные операции.
Примечание - К данному типу роботов относятся также роботы, осуществляющие разборку узлов;
- сварочные роботы - роботы, осуществляющие сварочные операции.
Примечание - К данному типу роботов относятся также роботы, осуществляющие пайку;
- окрасочные роботы - роботы, осуществляющие окрасочные операции.
Примечание - К данному типу роботов относятся также роботы, осуществляющие нанесение других видов покрытий и уплотнений;
- перегрузочные роботы - роботы, осуществляющие загрузо-разгрузочные операции;
- упаковочные роботы - роботы, осуществляющие упаковочные операции;
- измерительные роботы - роботы, осуществляющие измерительные операции;
- обрабатывающие роботы - роботы, осуществляющие операции механообработки (шлифовка, удаление заусениц, резка и т.п.).
5.1.10 По кинематической схеме промышленные манипуляционные роботы подразделяют на:
- роботы с прямоугольной (декартовой) системой координат - роботы, имеющие три поступательные взаимно перпендикулярные степени подвижности, образующие прямоугольную (декартову) систему координат (рисунок 1) .
Примечание - К данному типу роботов относятся также портальные роботы;
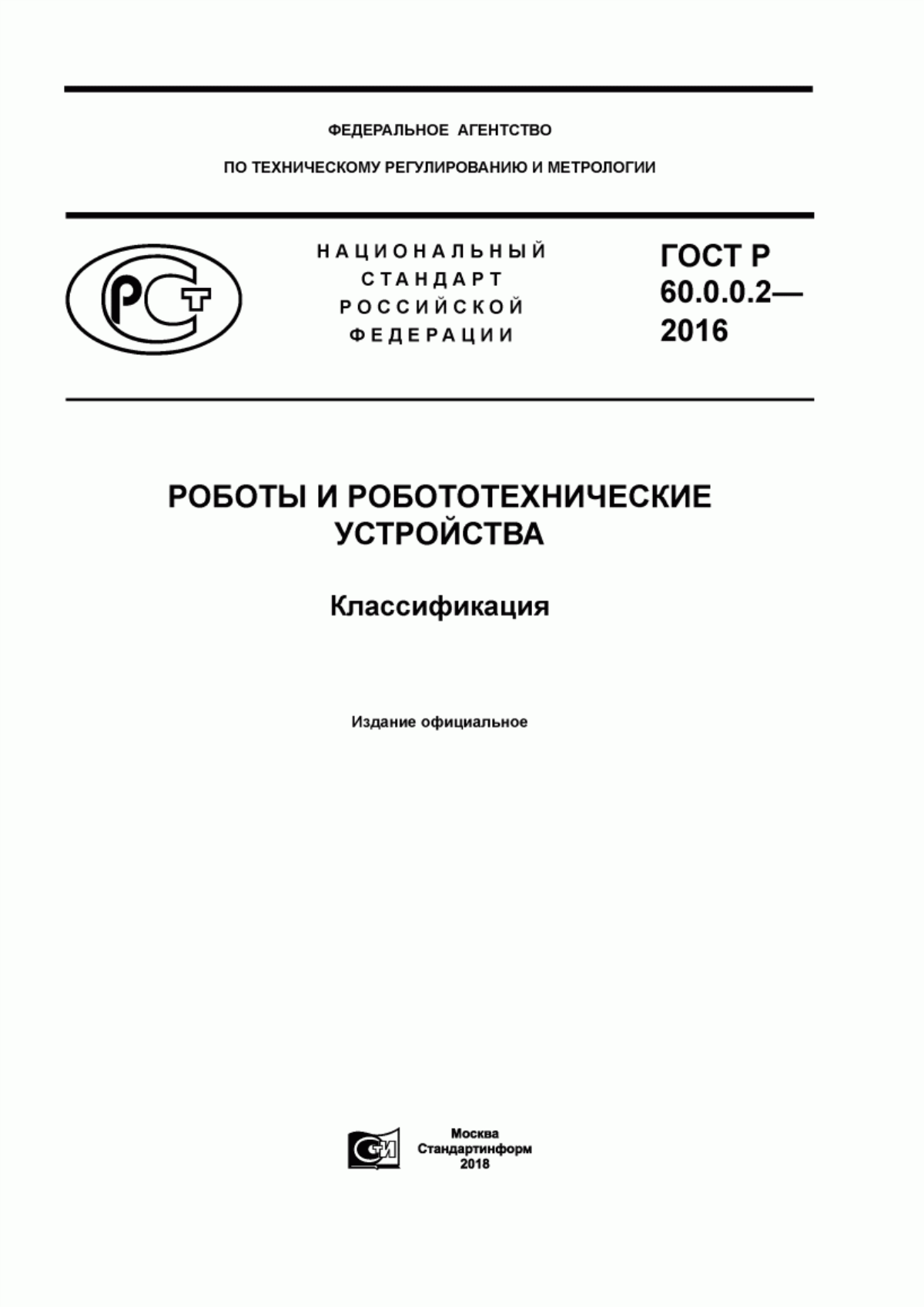
- роботы с цилиндрической системой координат - роботы, имеющие одну вращательную степень подвижности и не менее одной поступательной степени подвижности, которые образуют цилиндрическую систему координат (рисунок 2);
- роботы со сферической (полярной) системой координат - роботы, имеющие две вращательные степени подвижности и одну поступательную степень подвижности, которые образуют сферическую (полярную) систему координат (рисунок 3);
- роботы с угловой системой координат (шарнирные роботы) - роботы, имеющие не менее трех вращательных степеней подвижности (рисунок 4);
- роботы SCARA (СКАРА) - роботы, имеющие две вращательные степени подвижности с параллельными осями, обеспечивающими плавные движения в выбранной плоскости (рисунок 5);
- роботы с параллельной кинематикой - роботы, звенья которых образуют замкнутые кинематические цепи с вращательными и поступательными шарнирами, имеющими параллельные оси;
- роботы с комбинированной кинематикой - роботы, кинематика которых представляет собой комбинацию указанных выше схем.
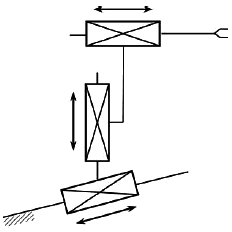
Рисунок 1 - Пример структурной кинематической схемы робота с прямоугольной системой координат
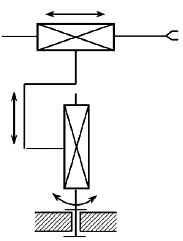
Рисунок 2 - Пример структурной кинематической схемы робота с цилиндрической системой координат
Рисунок 3 - Пример структурной кинематической схемы робота со сферической системой координат
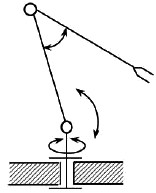
Рисунок 4 - Пример структурной кинематической схемы шарнирного робота
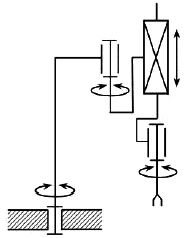
Рисунок 5 - Пример структурной кинематической схемы робота SCARA
5.1.11 По способу установки на рабочем месте промышленные роботы подразделяют на:
- напольные промышленные роботы;
- подвесные промышленные роботы;
- встроенные промышленные роботы.
5.2 Классификация сервисных роботов
5.2.1 В настоящем стандарте определена классификация сервисных роботов по следующим признакам:
- возможность передвижения;
- область применения.
В связи с большим разнообразием сервисных роботов, их классификации по другим признакам, например по грузоподъемности или способу управления, должны быть определены в других стандартах, относящихся к отдельным областям применения роботов.
Пример - Классификация мобильных робототехнических комплексов для проведения аварийно-спасательных работ и пожаротушения определена в ГОСТ Р 54344.
5.2.2 По возможности передвижения сервисные роботы подразделяют на:
- мобильные сервисные роботы;
- стационарные сервисные роботы;
- экзоскелеты.
Примечание - Большинство существующих сервисных роботов относят к классу мобильных сервисных роботов.
5.2.3 По области применения сервисные роботы подразделяют на:
- сервисные роботы для личного и домашнего использования;
- сервисные роботы для профессионального использования.
5.2.3.1 Сервисные роботы для личного и домашнего использования подразделяют на:
- сервисные роботы для работ по дому:
- роботы помощники, собеседники;
- роботы для уборки полов;
- роботы для стрижки газонов;
- роботы для чистки бассейнов;
- роботы для мытья окон;
- другие виды сервисных роботов для работ по дому;
- сервисные роботы для досуга:
- роботы-игрушки;
- мультимедийные роботы;
- обучающие роботы;
- другие виды сервисных роботов для досуга;
- сервисные роботы для помощи престарелым людям и инвалидам:
- робототехнические кресла-каталки;
- робототехнические ортопедические аппараты и протезы;
- другие виды помогающих сервисных роботов;
- персональные транспортные роботы;
- сервисные роботы, обеспечивающие безопасность и надзор за домом;
- другие виды сервисных роботов для личного и домашнего использования.
5.2.3.2 Сервисные роботы для профессионального использования подразделяют на:
- сервисные роботы для профессиональной уборки:
- роботы для уборки полов;
- роботы для очистки окон и стен;
- роботы для очистки цистерн, бочек и труб;
- роботы для очистки крупных корпусов (самолетов, автомобилей и т.п.);
- другие виды сервисных роботов для уборки;
- сервисные роботы для работы в общественных местах:
- роботы для обслуживания гостиниц и ресторанов;
- роботы для указания маршрута, сопровождения и информирования;
- роботы для рекламы и маркетинга;
- роботы для развлечения;
- другие виды сервисных роботов для работы в общественных местах;
- сервисные роботы для обследования и технического обслуживания:
- роботы для обследования и технического обслуживания производственных помещений и оборудования;
- роботы для обследования и технического обслуживания резервуаров, трубопроводов и коллекторов;
- другие виды сервисных роботов для обследования и технического обслуживания;
- сервисные роботы для строительства и сноса:
- роботы для демонтажа и сноса атомных, химических и других опасных объектов;
- роботы для строительства зданий;
- роботы для земляных работ;
- другие виды сервисных роботов для строительства и сноса;
- сервисные роботы для логистических систем:
- мобильные роботы для работы внутри помещений;
- мобильные роботы для работы на открытом воздухе;
- роботы для обработки и сортировки грузов;
- другие виды сервисных роботов для логистических систем;
- медицинские роботы:
- роботы для проведения диагностики;
- роботы для проведения хирургических операций;
- роботы для терапии заболеваний и травм;
- роботы для реабилитации пациентов;
- другие виды медицинских роботов;
- сервисные роботы для выполнения технологических операций вне помещений:
- роботы для сельскохозяйственных полевых работ;
- роботы для дойки;
- роботы для других видов работ в животноводстве;
- роботы для лесного хозяйства и лесоводства;
- роботы для горнорудной промышленности;
- другие виды сервисных роботов для выполнения технологических операций вне помещений;
- роботы для работы в экстремальных условиях:
- роботы для проведения аварийно-спасательных работ;
- роботы для пожаротушения;
- роботы для работы в условиях повышенной радиации;
- роботы для наблюдения, разведки и обеспечения безопасности;
- другие виды роботов для работы в экстремальных условиях;
- роботы военного и специального назначения:
- боевые (ударные) роботы;
- роботы боевого обеспечения (разведка, охрана военных объектов);
- роботы инженерного и химического обеспечения (разминирование, дезактивация территорий и военной техники, демонтаж зараженных конструкций);
- роботы технического и тылового обеспечения (экзоскелеты, транспортировка боеприпасов, эвакуация раненых);
- другие виды роботов военного и специального обеспечения;
- другие виды сервисных роботов для профессионального использования.
Примечания
1 При необходимости более детальные классификации сервисных роботов по отдельным категориям областей применения могут быть определены в соответствующих стандартах.
2 Классификация робототехнических комплексов для проведения аварийно-спасательных работ и пожаротушения, а также общие технические требования к ним и их системам управления установлены в ГОСТ Р 54344 и ГОСТ Р 55895.
Библиография
[1] | ИСО 8373:2012 (ISO 8373:2012)* | Роботы и робототехнические системы. Словарь (Robots and robotic devices - Vocabulary) |
________________
* Доступ к международным и зарубежным документам, упомянутым в тексте, можно получить, обратившись в Службу поддержки пользователей. - .
УДК 621.865.8:006.354 | ОКС 25.040.30 | ОКП 38 8600 |
Ключевые слова: роботы, робототехнические устройства, промышленные роботы, сервисные роботы, классификация | ||
Электронный текст документа
и сверен по:
, 2018
